Language Reference
CALL LPSOLVE (rc, objvalue, x, dual, reducost, c, a, b <*>, cntl <*>, rowsense <*>, range <*>, l <*>, u );
The LPSOLVE subroutine solves a linear programming problem. It uses a different input format and solver options from the LP call and is the preferred method for solving linear programming problems.
The input arguments to the LPSOLVE subroutine are as follows:
- c
-
is a vector of dimension n of objective function coefficients. A missing value is treated as 0.
- a
-
is an
 matrix of the technological coefficients. A missing value is treated as 0.
matrix of the technological coefficients. A missing value is treated as 0.
- b
-
is a vector of dimension m of constraints’ right-hand sides (RHS). For a range constraint, b is its constraint upper bound. A missing value is treated as 0.
- cntl
-
is an optional vector that contains one to eight elements that represent the LPSOLVE subroutine’s control options. The default value is used if an option is not specified or its value is a missing value. If cntl=(objsense, printlevel, maxtime, maxiter, presolve, algorithm,scaling, tol), then
- objsense
-
specifies whether it is a minimization or a maximization problem, where 1 specifies minimization and
 specifies maximization. The default value is 1.
specifies maximization. The default value is 1.
- printlevel
-
specifies the type of messages printed to the log. A value of 0 prints warning and error messages only, whereas 1 prints solution information in addition to warning and error messages. The default value is 0.
- maxtime
-
specifies an upper bound of running time in seconds. The default value is effectively unbounded.
- maxiter
-
specifies the maximum number of iterations to be processed. The default value is effectively unbounded.
- presolve
-
specifies the presolve option, where 0 indicates no presolve and 1 indicates an automatic presolve option.The default value is 1.
- algorithm
-
specifies the type of solver, where 1 specifies primal simplex, 2 specifies dual simplex, and 3 specifies interior point algorithm. The default value is 2.
- scaling
-
specifies whether to scale the problem matrix, where 0 turns off scaling and 1 turns on scaling. The default value is 1.
- tol
-
specifies a feasibility and optimality tolerance. The default value is
 .
.
- rowsense
-
is an optional row vector of dimension m that specifies the sense of each constraint. The values can be E, L, G, or R for equal, less than or equal to, greater than or equal to, or range constraint. If this vector is missing, the solver treats the constraints as E type constraints.
- range
-
is an optional row vector of dimension m that specifies the range of the constraints. The row sense for a range constraint is R. For the non-range constraints, the corresponding values are ignored. For a range constraint, the range value is the difference between its constraint lower bound and its constraint upper bound b, so it must be nonnegative.
- l
-
is an optional column vector of dimension n that specifies lower bounds on the decision variables. If you do not specify l or l[j] has a missing value, then the lower bound of variable j is assumed to be 0.
- u
-
is an optional column vector of dimension n that specifies upper bounds on the decision variables. If you do not specify u or u[j] has a missing value, the upper bound of variable j is assumed to be infinity.
The LPSOLVE subroutine returns the following values:
- rc
-
returns one of the following scalar return codes:
rc
Termination Reason
0
The solution is optimal.
1
The time limit was exceeded.
2
The maximum number of iterations was exceeded.
3
The solution is infeasible.
4
The solution is unbounded or infeasible.
5
The subroutine could not obtain enough memory.
6
The subroutine failed to solve the problem.
- objvalue
-
returns the optimal or final objective value at termination.
- x
-
returns the current primal solution in a column vector of length n.
- dual
-
returns the current dual solution in a row vector of length m.
- reducost
-
returns reduced cost in a column vector of length n.
The LPSOLVE subroutine solves linear programs. A standard linear program has the following formulation:
If only c, ![]() , and
, and ![]() are present, then LPSOLVE solves the following linear programming problem by default:
are present, then LPSOLVE solves the following linear programming problem by default:
The primal and dual simplex solvers implement the two-phase simplex method. In phase I, the solver tries to find a feasible solution. If it does not find a feasible solution the LP is infeasible; otherwise, the solver enters phase II to solve the original LP. The interior point solver implements a primal-dual predictor-corrector interior point algorithm.
Consider the following example:
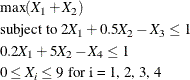
The problem is solved by using the following statements:
object = { 1 1 0 0 };
coef = { 2 .5 -1 0,
.2 5 0 -1};
b = { 1, 1 };
l = { 0 0 0 0 };
u = { 9 9 9 9 };
rowsense = {'L','L'};
cntl= -1;
call lpsolve (rc,objv,x,dual,rd,object,coef,b,cntl,rowsense,,l,u);
print objv, x, dual, rd;